Stratosphere
Troposphere
Atmospheric
Measurement
Glider
Stratosphere Troposphere Atmospheric Measurement Glider
|
|
Rawinsonde
observations are generally considered to be the most important input to
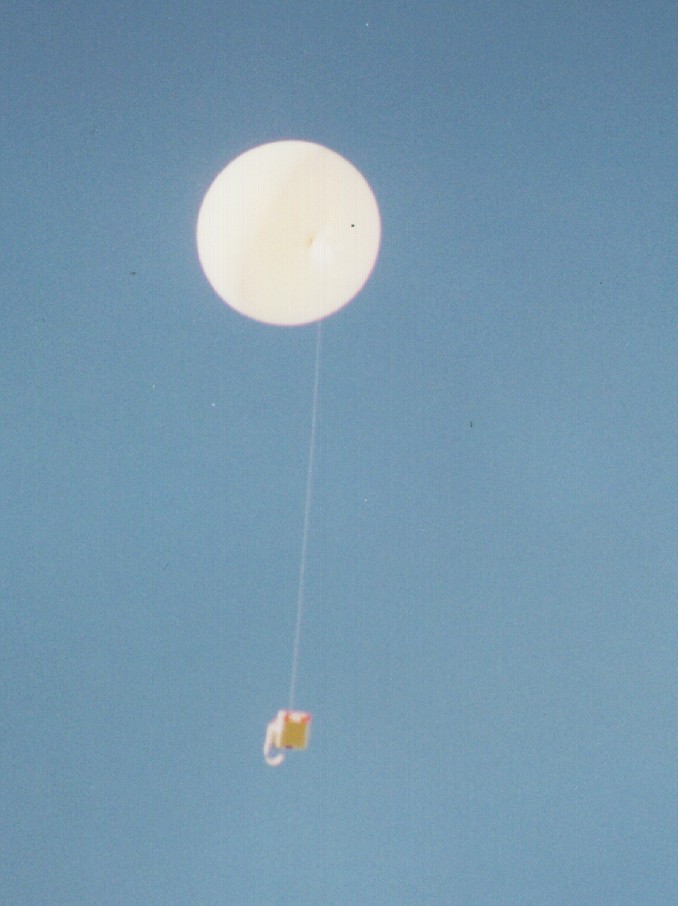
Numerical Weather prediction models. These rawinsondes are generally expendable
packages which are attached to a helium or hydrogen-filled weather balloon (see
Figure 1). The number of rawinsondes launched each
year by meteorological agencies numbers in the millions worldwide and only a
small number of these sensors are retrieved. The
main aim of the current project is to examine the possibility of producing a
recoverable rawinsonde sounding system. In addition,
several recent experiments, which incorporated high-value instruments, have been
launched into the stratosphere via balloon. Several of
these projects would have significantly benefited from the retrieval of the
instrument and future research projects within the atmospheric group would
benefit from this ability.
The data retrieved by these instruments generally includes pressure,
temperature, relative humidity and many now have some form of GPS-based wind
speed and direction measurement ability. The benefits of a recoverable system
are –
•
more accurate calibrated
sensors can be utilised which could not be used in an expendable platform
because of cost and time constraints.
•
measurements can be made on
the up- and the down-leg of the mission.
•
the use of a recoverable
rawinsonde package could significantly reduce the cost of routine observations
by meteorological services and thus may be important in increasing the amount of
atmospheric information measured. The cost-effectiveness of such a system may be
of significant use in increasing the number of launches made in third world
countries.
Another benefit of such a system which
is under consideration is the ability of the system to loiter over a specified
area, defined by a set of waypoints, this may be of significant use in intensive
measurement campaigns and in mesoscale model studies. A prototype powered
version of the current STAG design is indicated in Figure 2.
The aim
of this project is to design and produce an efficient instrument retrieval
system that could be used with balloon-borne systems. In addition, this research
programme aims to make detailed measurements of atmospheric dynamics (namely
horizontal wind speed and direction) using GPS receivers. On-board sensors will
also measure atmospheric pressure, temperature and humidity. Later versions of
STAG will also carry Electrochemical Concentration or Chemiluminescent
Ozonesondes.
The system envisaged (called STAG) is a small glider (»1.5m wingspan) equipped with a set of meteorological measurement sensors
which, after prototyping, will be launched from a meteorological balloon at
altitude. STAG will make measurements of pressure, temperature, relative
humidity, wind speed and direction, and ozone concentration which will be
telemetered back to a ground station in a similar fashion to a standard
rawinsonde. However, the system will be able to autonomously guide itself back
to the ground station using information from a digital compass, GPS data and a
set of accelerometers processed onboard by a network of task-specific
microcontrollers. This ability will allow measurements of atmospheric parameters
to be made inexpensively and on the up- and down-legs of the flight. The
autonomous guidance ability of a powered version of the glider is currently
under test at low altitudes. An initial description of the prototype and
discussion about the guidance performance to date is detailed. The stages of
prototyping to be performed will also be discussed. The possibility of using the
powered version of STAG for low–level pollution studies and air-quality
monitoring is to be considered.
The final STAG system
should allow the following operations to be performed–
•
Record pre-launch
information, which includes pressure, temperature, relative humidity and a
launch position based upon GPS data.
•
Launch by a helium or
hydrogen-filled meteorological balloon
•
Ascend to the balloon burst
altitude (or to a user-specified altitude at which point a release servo will be
activated) while transmitting data to the ground station via an on-board UHF
transmitter. Onboard memory will also allow the measurements to be downloaded at
a later date if the data is not received at the ground station.
•
Travel under autonomous
control to an area above the launch point. An algorithm examines the current GPS
position and the launch point position and calculates whether this is possible
based on the gliders aerodynamic parameters (the glide slope being the most
important parameter). If the launch point can not be attained (which is likely
in high wind conditions) a secondary landing site should be targeted.
•
Once the glider is above the
launch position (or the secondary landing site) the glider should either circle
the launch point or define a path between a set of pre-defined waypoints until a
lower altitude is reached. At this point a servo is triggered which releases a
parachute. A homing signal is also activated at this point which allows the STAG
instrument to be recovered.
Autonomous
Control and the Environmental Measurement System
A block diagram which
indicates the major components of the STAG electronic systems is shown in Figure
3. The system can be separated into five sections, these are –
•
Enviromental measurement
unit
•
Navigation microcontroller
•
Aircraft control
micro-controller
•
Navigation and
aircraft attitude sensors
•
STAG Servos
It should be noted
that because of the difficulty and expense of frequent balloon launches’ a
powered design has been used to test the autonomous control system. The use of a
powered design requires the glider to be controlled from the ground at take-off
and landing and a standard radio-control receiver has been integrated into the
onboard electronics to allow this function to be performed. The heart of the
environmental measurement unit is a microcontroller, the readings from the
atmospheric sensors (pressure, temperature and relative humidity) are passed via
an analog to digitial converter to this mircocontroller. Digital data from the
GPS unit is then integrated into a data stream in the microcontroller. The
microcontroller codes this data stream for input to the on-board UHF transmitter
which transmits the data to the
ground, this data stream also being passed to onboard memory which will allow
the measurements to be downloaded at a later date if the data is not received at
the ground station. Navigation commands are derived in the Navigation
microcontroller from the current compass heading and current GPS location
relative to those required to reach the launch site. The command, consisting of
a compass heading, is passed to the aircraft microcontroller which interprets
the navigation command and produces the modulated signal used to control the
aileron, rudder and elevator servos. It should be noted that in the powered
prototype these servos can also be controlled via a standard model aircraft
radio-controller. Navigation commands defining a set of predefined waypoints can
also be downloaded to the navigation microcontroller pre-launch, this ability
has been of particular use during the prototyping and testing phases of the
autonomous control system where the glider can be set to autonomous control then
commanded to perform a loiter manoeuvre. Currently, a signal from the
radio-control transmitter is used to tell the aircraft microcontroller to
relinquinsh control of the glider servos so that the powered aircraft can be
landed under human control. It should be noted that the range of the
radio-control system is relatively limited (less than 2km) and this has limited
test flights to relatively short test periods for the autonomous control system
in order to ensure that the glider can be placed under human control at any
time.
A PDF version of a poster describing some initials results from the STAG system which was presented at the 2002 Conference of The Meteorological Society of New Zealand can be found here (229kBytes).
A brief article in the Christchurch Press on the glider from 13th May 2003 can be found here (590kBytes).
A copy of an invited talk given to NIWA at the Greta point office in Wellington from 31st October is available here (3.7MBytes).
A PDF version of a poster describing initial results of what was thought to be a sea breeze (but after discussion may be associated with a lee trough) presented at the 2003 Conference of The Meteorological Society of New Zealand can be found here (252kBytes). Note this work was primarily carried out by Andreas Baumgartner an Honours student.
Acknowledgements
Dr. McDonald would
like to acknowledge grant U6331 awarded by the
{kind=link}